All
Human-robot alignment
Contact-rich robot manipulation
Fundamental methods
2024
Task-Driven Hybrid Model Reduction for Dexterous Manipulation
IEEE Transactions on Robotics (T-RO), 2024
Adaptive Contact-Implicit Model Predictive Control with Online Residual Learning
IEEE International Conference on Robotics and Automation (ICRA), 2024
2023

Guaranteed Stabilization and Safety of Nonlinear Systems via Sliding Mode Control
IEEE Control Systems Letters, 2023
Adaptive Barrier Smoothing for First-Order Policy Gradient with Contact Dynamics
International Conference on Machine Learning (ICML), 2023
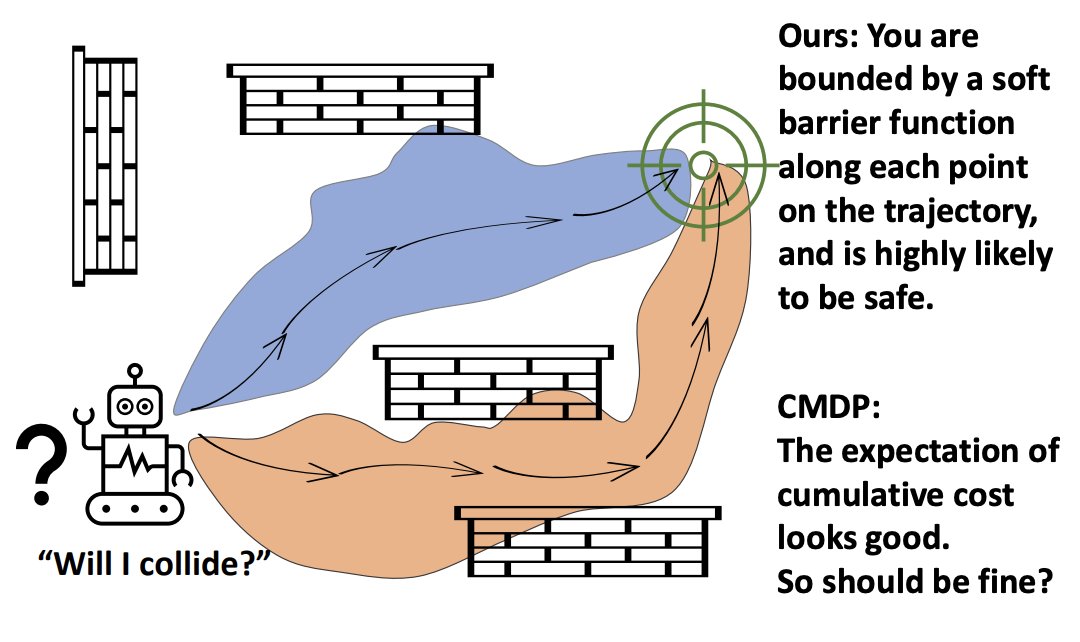
Enforcing Hard Constraints with Soft Barriers: Safe-driven Reinforcement Learning in Unknown Stochastic Environments
International Conference on Machine Learning (ICML), 2023
Robust Safe Learning and Control in Unknown Environments: An Uncertainty-Aware Control Barrier Function Approach
IEEE Robotics and Automation Letters (RA-L), 2023
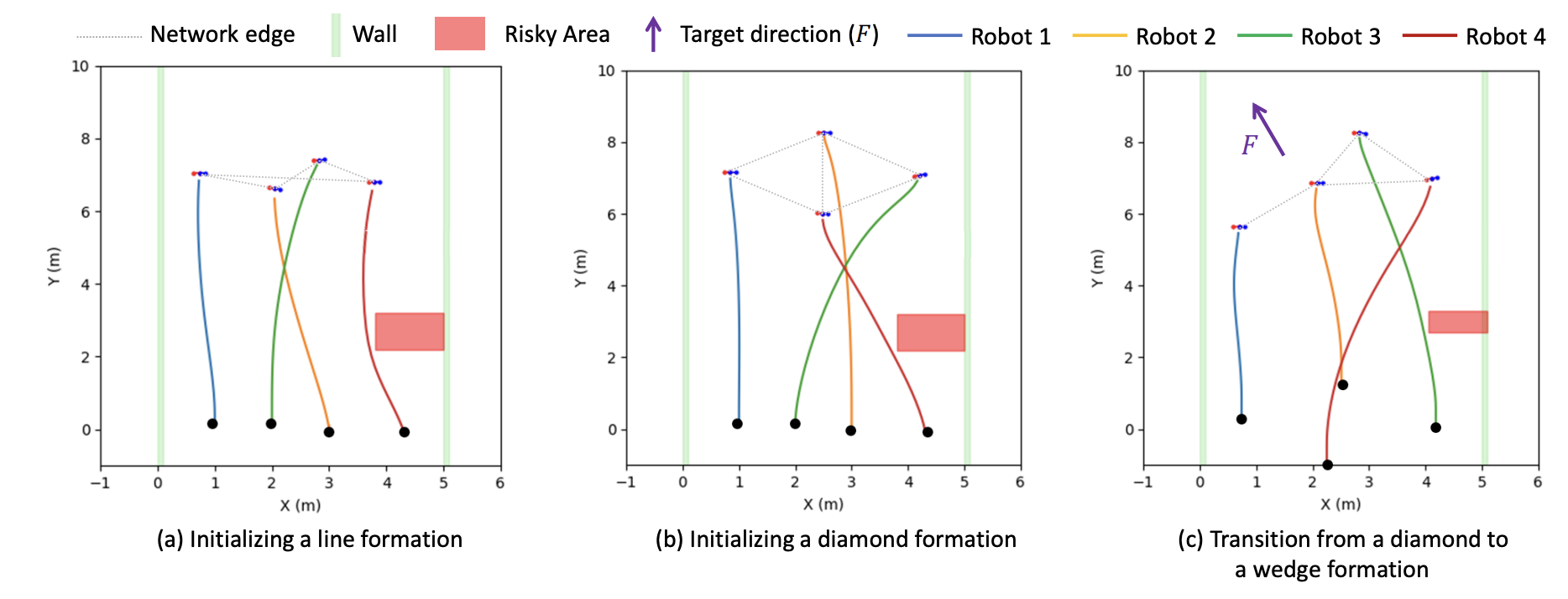
D3G: Learning Multi-robot Coordination from Demonstrations
IEEE International Conference on Intelligent Robots and Systems (IROS), 2023.
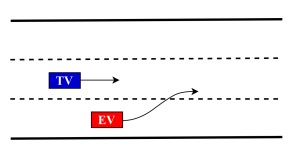
Identifying Reaction-Aware Driving Styles of Stochastic Model Predictive Controlled Vehicles by Inverse Reinforcement Learning
nternational Conference on Intelligent Transportation Systems (ITSC), 2023.
2022

Learning from Human Directional Corrections
IEEE Transactions on Robotics (T-RO), 2023
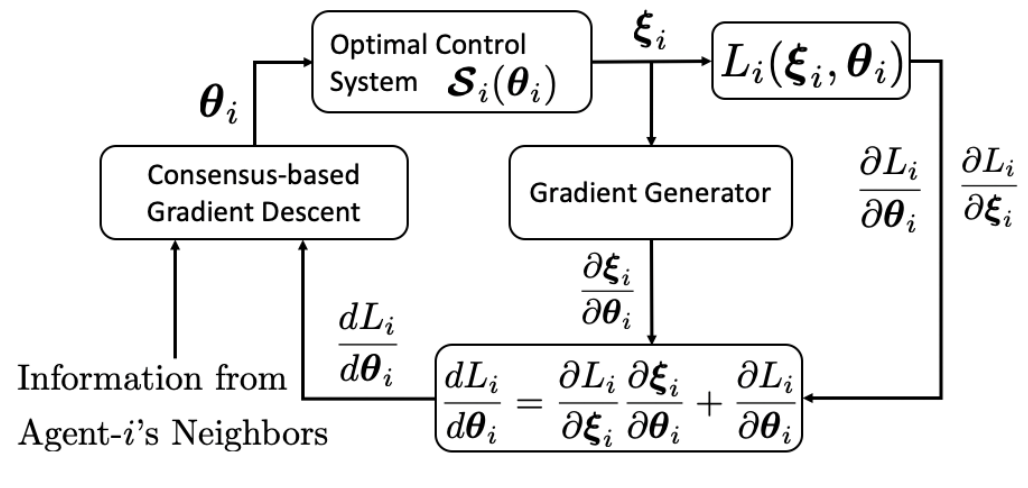
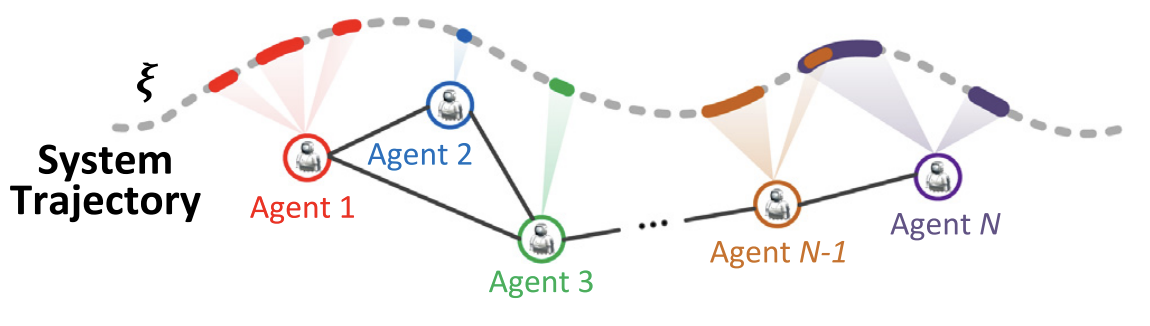
Cooperative Tuning of Multi-Agent Optimal Control Systems
IEEE Conference on Decision and Control (CDC), 2022
2021
Inverse Optimal Control from Incomplete Trajectory Observations
International Journal of Robotics Research (IJRR), 40:848–865, 2021
Safe Pontryagin Differentiable Programming
Advances in Neural Information Processing Systems (NeurIPS), 2021
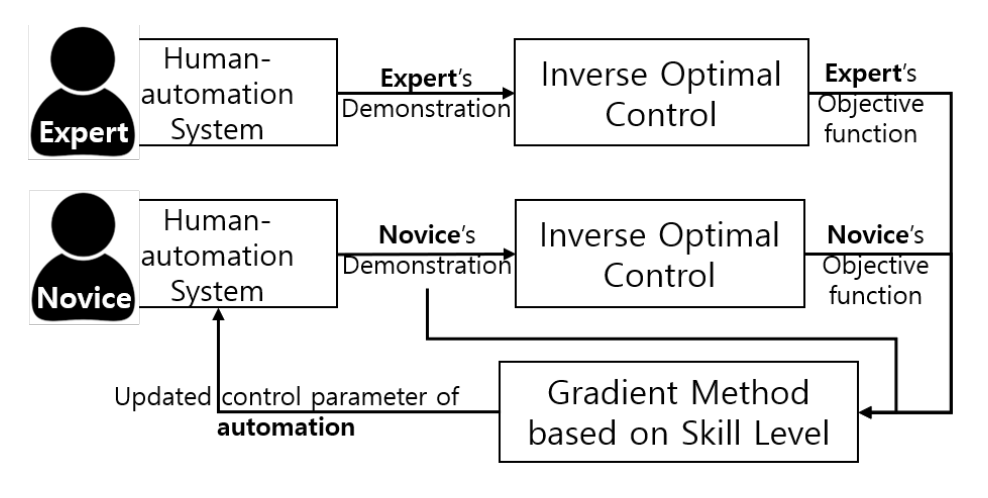
Human-Automation Interaction for Assisting Novices to Emulate Experts by Inferring Task Objective Functions
AIAA/IEEE 40th Digital Avionics Systems Conference (DASC) , 2021. Best Student Paper Finalist
2020
Pontryagin Differentiable Programming: An End-to-End Learning and Control Framework
Advances in Neural Information Processing Systems (NeurIPS), 2020