Research Directions
The IRIS lab focuses on three reserach directions: (1) human-robot alignment, (2) contact-rich robot manipulation, and (3) fundamental methods in robotics. Below are some recent publications in each set of research interest. Please visit Publications page for a full list of publications.
Human-robot alignment
We develop methods to empower a robot with the ability to efficiently understand and be understood by human users through a variety of physical interactions. We explore how robots can aptly respond to and collaborate meaningfully with users.

- Robot learning from general human interactions
- Planning and control for human-robot systems
Contact-rich robot manipulation
We aim to leverage physical principles to develop efficient representations or models for robot's physical interaction with environments. We also focus on developing algorithms to enable robots efficiently and robustly manipulate their surroundings/objects through contact.
- Learning, planning, and control for contact-rich manipulation
- Computer vision and learnable geometry for dexterous manipulation
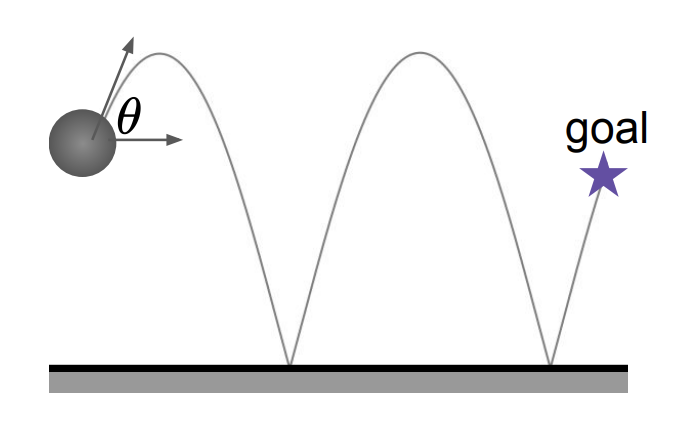
Adaptive Barrier Smoothing for First-Order Policy Gradient with Contact Dynamics
International Conference on Machine Learning (ICML), 2023
Fundamental methods in robotics
We focus on developing fundamental theories and algorithms for achieving efficient, safe, and robust robot intelligence. Our methods lie at the intersection of model-based (control and optimization) and data-driven approaches, harnessing the complementary benefits of both.
- Optimal control, motion plannig, reinforcement learning
- Differentiable optimization, inverse optimization
- Hybrid system learning and control
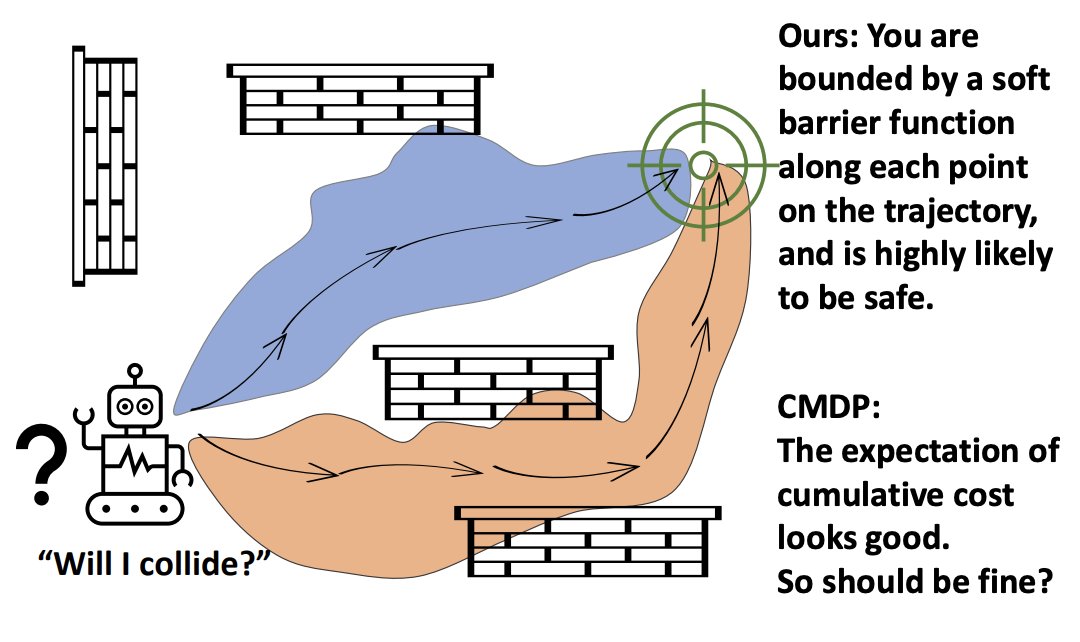
Enforcing Hard Constraints with Soft Barriers: Safe-driven Reinforcement Learning in Unknown Stochastic Environments
International Conference on Machine Learning (ICML), 2023
Software & Data
We embrace the open-source spirit and are committed to promoting research reproducibility and accessibility. Please find below some popular repositories we have highlighted. Please visit Publications or GitHub page for more.
Computation
Interactive Games
Manpulation